我们的阵容
RoboMaster2025 机器人阵容

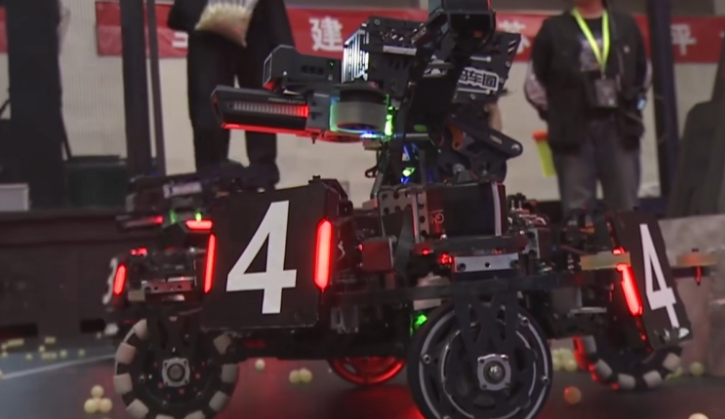
英雄机器人
英雄机器人作为赛场上唯一使用42毫米大弹丸的单位,更大的口径使得ta可以对对方单位造成大量伤害。
正如ta坦克般的外形一样,是“型”副其实的攻城利器,搭配其独特的“部署模式”成为攻击前哨与基地的一柄利剑。
顺风时是摧枯拉朽的吊射机器,逆境时是团队扭转乾坤的关键,这就是“hero”。

工程机器人
工程机器人拥有配备麦克纳姆轮的底盘,这使得机器人能在全方位灵活移动。
同时,机器人还拥有灵活的机械臂,可以做出高难度动作,在取矿和兑矿中取得优势。
工程机器人的精巧设计和精密算法,使得其在赛场上成为名副其实的“黄金矿工”。

全舵步兵机器人
得益于四个独立转向舵轮的设计和精妙的算法,机器人可以兼具高机动性和精确控制。
机器人还搭载了miniPC,可以在适当情况下接管火控,实现自瞄开火,大大提高了机器人的命中率。
半舵步兵机器人
底盘采用自适应舵轮,全向轮作为导轮,高地形通过性。
云台采用下供弹构型,10米散步为小装甲板。总体采用轻量化设计,速度快,弹道准。最高KDA8/1/1

全向步兵机器人
凭借全向轮的独特布局与智能控制策略,机器人能够实现全方位灵活移动,适配多样场景。
机器人搭载智能视觉系统,结合先进算法,可精准识别目标、感知距离,在动态场景中快速响应。

哨兵机器人
全自动导航:依托全向舵轮系统提供的高精度里程计,深度融合激光雷达DLIO定位算法与PCL点云处理技术,并采用TEB局部路径规划算法,实现机器人在复杂环境中的平滑、稳定与高精度自主导航。
全自动运行:通过卡尔曼滤波算法融合多传感器数据,实现对机器人自身运动状态的精确感知与预测;结合TF坐标变换体系,构建统一的时空基准框架,并运用PNP解算算法实时计算目标物体的三维位姿,为自主决策提供高精度的定位信息。
全自动识别:采用海康威视高性能工业相机进行图像采集,基于OpenCV计算机视觉库进行图像预处理与特征提取,结合深度学习神经网络算法实现复杂场景下的数字识别与目标检测,确保识别过程的准确性、实时性与鲁棒性。
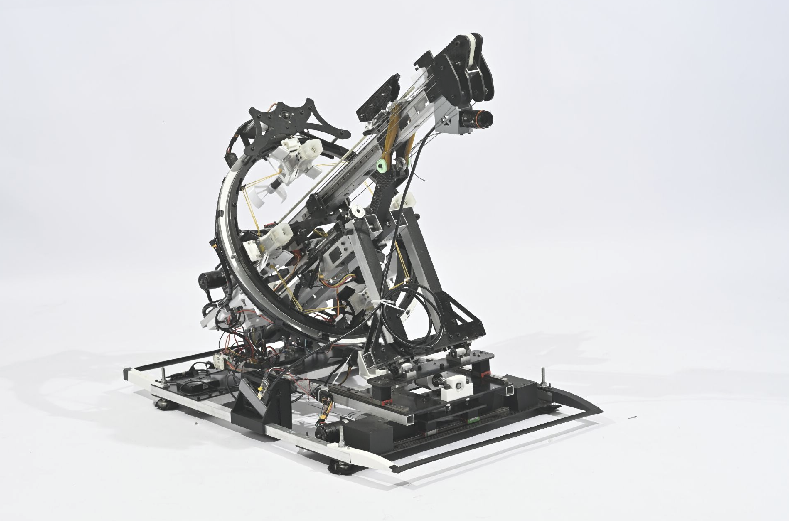
飞镖系统
飞镖系统的发射部分以拉簧方式储能,通过扳机的位置调整所储能量的大小,经滑轮连接滑台发射飞镖;
换弹部分通过电机驱动同步带旋转换弹圆环,以微动开关实现稳定换弹;
底盘具备yaw轴及pitch轴的调整能力辅以实现飞镖的精准打击

雷达系统
雷达系统是赛场上的“洞察之眼”与“决策中枢”。
它能敏锐捕捉周边目标的细微动态,精准完成定位、测距与轨迹预判,将实时数据高效传递给机器人控制系统,为每一步战术决策提供关键依据。
无论面对复杂场地的障碍规避,还是激烈对战中的目标锁定,都能快速响应、稳定输出,以精准感知助力战队在交锋中抢占先机,尽显技术锋芒。